Sample Visual Control Program
10/06/07 22:13
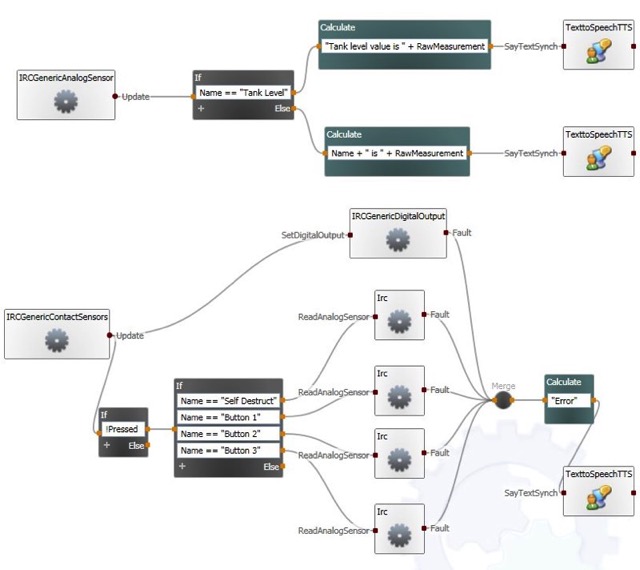
After many hours of climbing a steep learning curve, I have managed to complete an initial set of robotic services for the hardware controller.
The current services are:
My general impression of the MSRS is that it has huge potential as a platform for standardizing the robotics and control industries.
The current services are:
- A “Brick” service that interfaces the Microsoft Robotics Studio (MSRS) runtime with my custom controller hardware. It communicates via RS232 to the embedded microprocessor.
- A Contact Sensor service which provides “events” to the MSRS control program when things like buttons connected to the hardware change state.
- An Analog Sensor service which notifies the system when an analog reading has arrived.
- A Digital Output service which actions digital output requests i.e. set/reset bits on the controller hardware.
My general impression of the MSRS is that it has huge potential as a platform for standardizing the robotics and control industries.