Jun 2007
Sample Visual Control Program
10/06/07 22:13
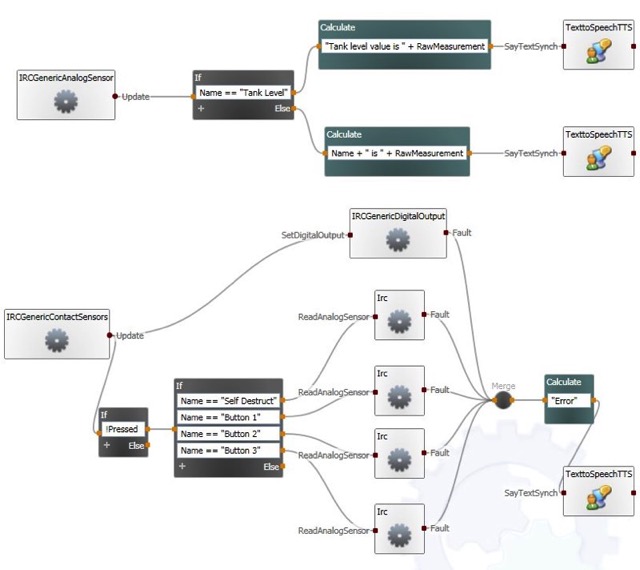
After many hours of climbing a steep learning curve, I have managed to complete an initial set of robotic services for the hardware controller.
The current services are:
My general impression of the MSRS is that it has huge potential as a platform for standardizing the robotics and control industries.
The current services are:
- A “Brick” service that interfaces the Microsoft Robotics Studio (MSRS) runtime with my custom controller hardware. It communicates via RS232 to the embedded microprocessor.
- A Contact Sensor service which provides “events” to the MSRS control program when things like buttons connected to the hardware change state.
- An Analog Sensor service which notifies the system when an analog reading has arrived.
- A Digital Output service which actions digital output requests i.e. set/reset bits on the controller hardware.
My general impression of the MSRS is that it has huge potential as a platform for standardizing the robotics and control industries.
Home Control System
04/06/07 22:04
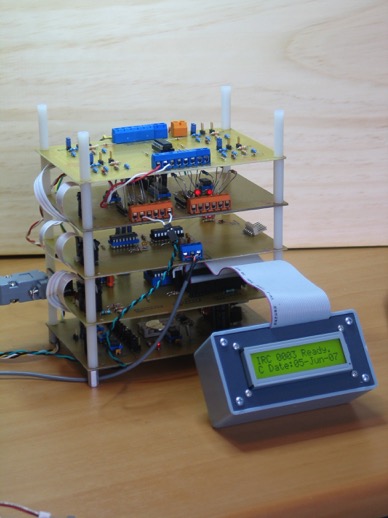
My main practical University project was to build a home security and control system. Ever since then I have wanted to build one that not only controlled lights and monitored sensors but provided a level of intelligence that would improve the quality and efficiency of the living environment.
To that end I have designed a microprocessor based controller for use as a control node in a distributed control system. This will act as the eyes and ears as well as the arms and legs of the system.
The hardware is only one half of the system. The other half is in the control software. Both on the embedded controller and on the supervisory PC based system. For that I use the new Microsoft Robotics Studio and custom driver software I have written in C on the embedded controller platform.
To that end I have designed a microprocessor based controller for use as a control node in a distributed control system. This will act as the eyes and ears as well as the arms and legs of the system.
The hardware is only one half of the system. The other half is in the control software. Both on the embedded controller and on the supervisory PC based system. For that I use the new Microsoft Robotics Studio and custom driver software I have written in C on the embedded controller platform.